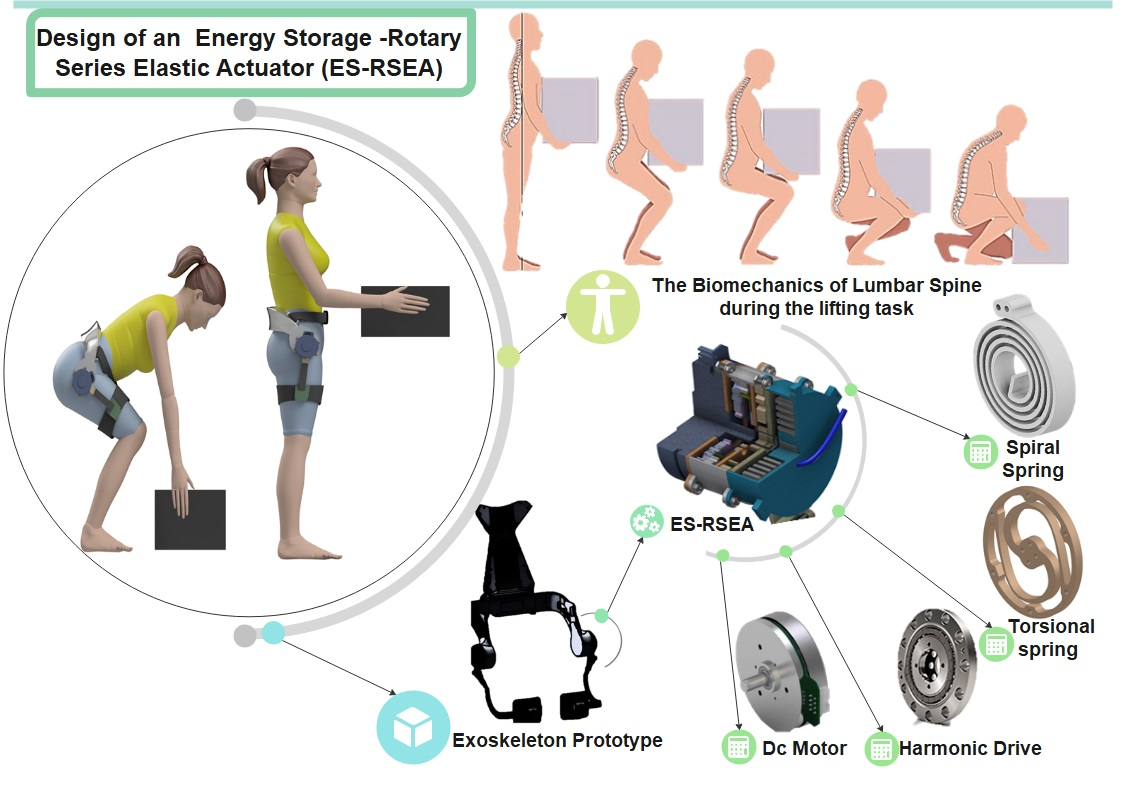
Passive back support exoskeleton: In the elastic spinal module
4.5 (588) · $ 14.99 · In stock

Multibody dynamics and optimal control for optimizing spinal

Left: Kinematich structure of the Robomate exoskeleton: only the
Machines, Free Full-Text

PDF) Rationale, Implementation and Evaluation of Assistive
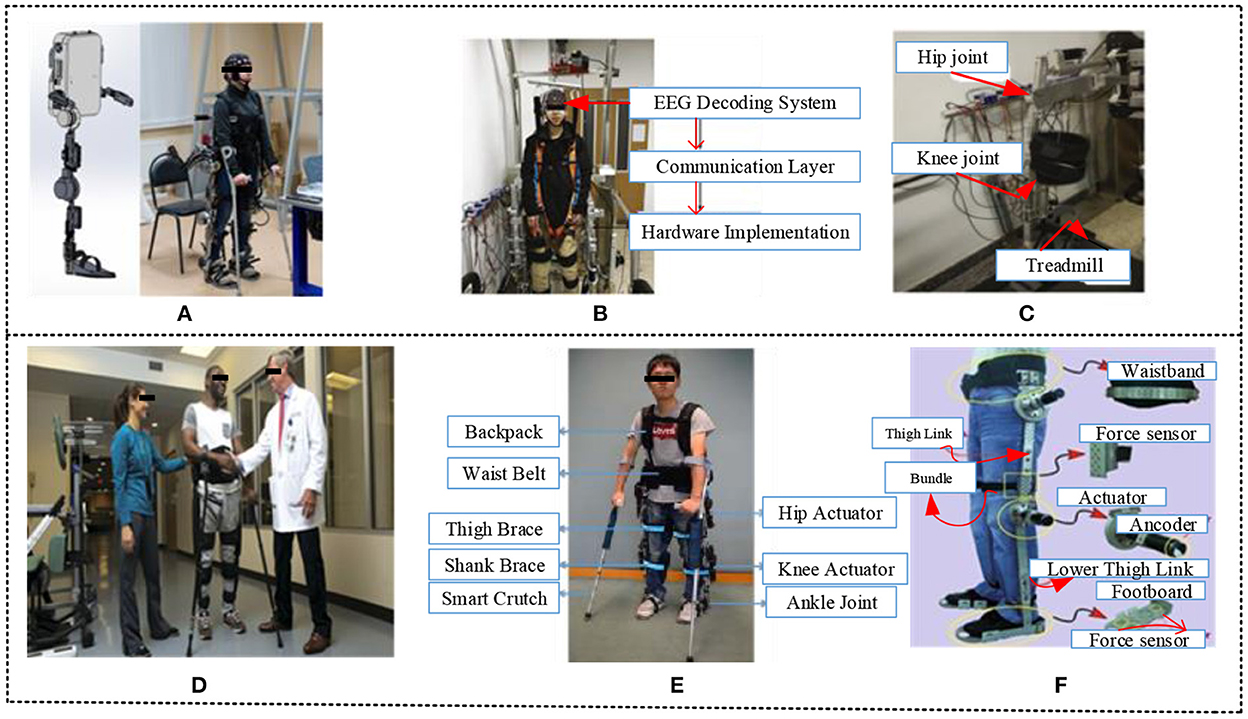
Frontiers Lower limb exoskeleton robot and its cooperative

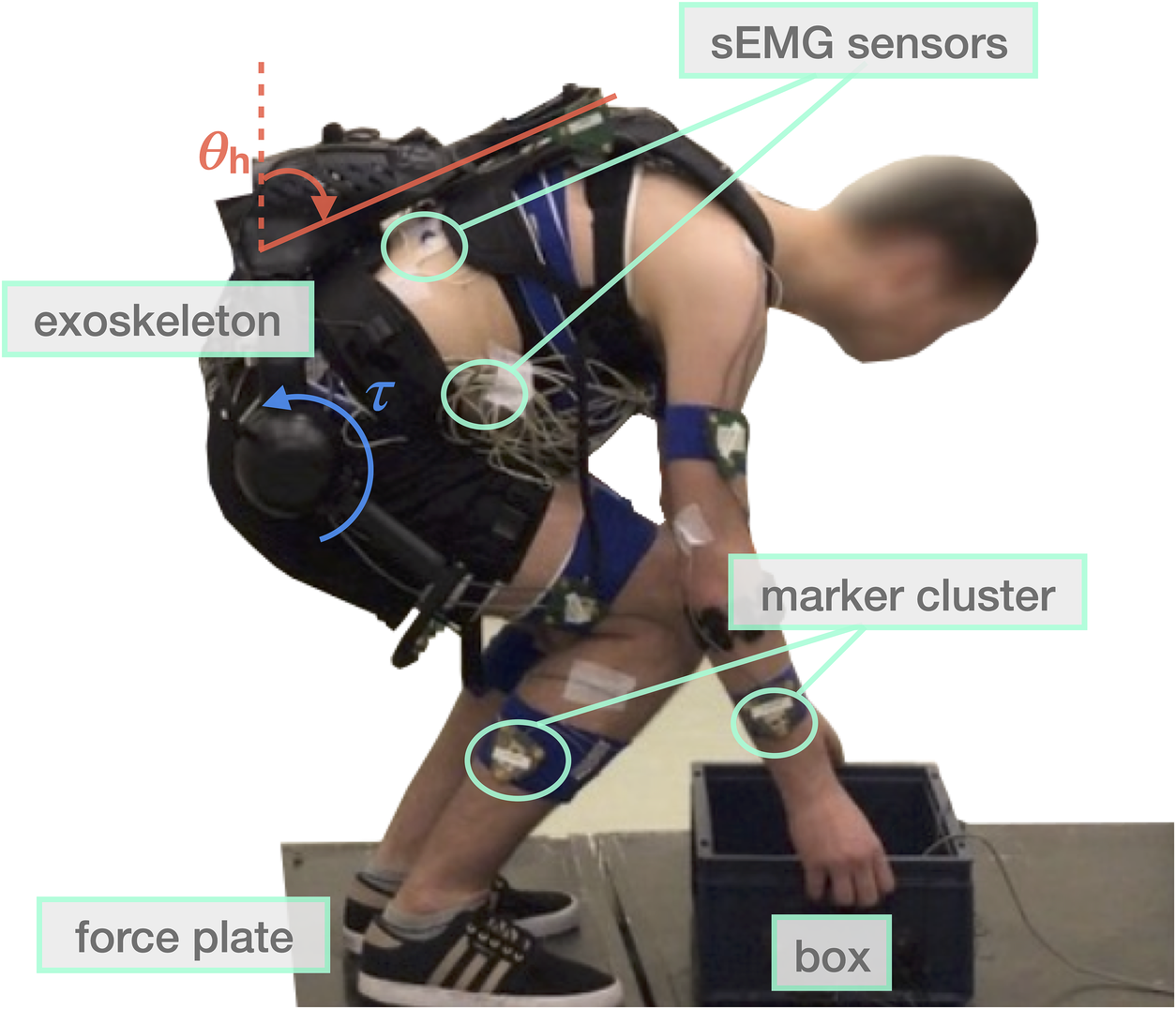
Short-Term Effects of a Passive Spinal Exoskeleton on Functional

Interpretative paleogeographic block diagram (a) and idealized section

Carlos RODRIGUEZ-GUERRERO, Professor, Professor, KU Leuven, Leuven, ku leuven, Department of Mechanical Engineering
PDF) Passive Back Support Exoskeleton Improves Range of Motion

Head injury risk is enhaced by loose objects, HIC15 for scenario with

Carlos RODRIGUEZ-GUERRERO, Professor, Professor, KU Leuven, Leuven, ku leuven, Department of Mechanical Engineering

Applied Sciences, Free Full-Text
Design methodology of an active back-support exoskeleton with adaptable backbone-based kinematics - ScienceDirect, backbone







